金屬管轉(zhuǎn)子流量計
由于(yu)它的流通面積(ji)是随着流量的(de)大小而改變的(de),故☁️又被稱爲變(bian)面積流量計。作(zuò)爲轉子式流量(liàng)計,它不僅🚶有效(xiao)地擴大了原來(lai)玻璃轉子流量(liàng)計的測量範圍(wéi),而且提高✨了對(dui)使用環境的适(shì)應性,還可測量(liang)🔞多種介質(包括(kuò)一些高粘度和(he)腐蝕性介質)的(de)流量💃,特别适宜(yi)測✍️量中、小管徑(jìng)、較低雷諾數的(de)中、小流量,刻度(du)近似線性(最大(da)刻度非線性程(cheng)度約爲20%一25%,通過(guò)🐇指示器中的凸(tu)輪闆進行修正(zheng)),量程比爲1;10,甚至(zhi)可以更寬,壓爲(wei)損失較小且恒(héng)定,精度在土2.5%左(zuǒ)⛱️右,使用維護簡(jiǎn)便,對儀表前的(de)直管段要求不(bu)高,特别是♊當采(cai)💞用了變電容式(shi)角位移轉換器(qi),還能進行🏒遠距(ju)離信🏒号傳輸和(hé)實現自動控制(zhì)。憑借其自身的(de)這些有利的特(te)點,近幾年來,它(ta)在國内流量測(cè)量領域裏正異(yì)軍突起,開始廣(guang)泛應用于國防(fáng)、化工、石油、冶金(jin)、醫藥🤩和輕工等(děng)工業部門的液(yè)體、氣體流量測(ce)量和自動控制(zhì)系統。
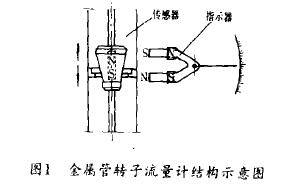
金屬管轉(zhuan)子流量計的結(jié)構如圖1所示,傳(chuan)感器中浮子位(wèi)📞置的變化反映(ying)了流量的大小(xiǎo),當被測量發生(sheng)變化,儀表的指(zhi)示标✉️尺(運動部(bù)件)将由原來的(de)平衡位置移動(dòng)到新的平衡📞位(wei)置,但是指示标(biāo)尺由戶質性的(de)作用,它不能立(lì)♉刻停止在新的(de)平衡位置,而在(zai)此位置附近往(wǎng)複振蕩。特🍓别是(shì)當該儀表被用(yong)于測量氣體流(liu)量☎️時,在管路系(xì)統中㊙️有時出現(xiàn)流體的脈動現(xiàn)象,使🌍得傳感器(qi)中浮子出現往(wǎng)複的機械振動(dong)✨,通過磁禍合,這(zhe)種有害的振動(dòng)将被傳遞給指(zhǐ)示器中的指示(shì)☔标尺,嚴重地影(ying)響儀🤞表的準确(què)讀數。對于具有(you)電遠傳性能🚶的(de)儀表,還将引起(qi)輸出😄信号的不(bu)平穩,并使與之(zhi)配套的記錄✔️儀(yi)表的記錄嚴重(zhong)失真🏃🏻。因而,要克(ke)服這種流體脈(mo)動效應⚽引起的(de)機械振動🌐現象(xiàng),筆者💘在其指示(shi)器内設置阻尼(ní)裝置⭐,以提高其(qí)讀數精度。
以(yǐ)下就空氣阻尼(ni)裝置、液體阻尼(ni)裝置和磁感應(ying)阻尼📧裝🔴置的性(xing)能特性進行分(fen)析比較。
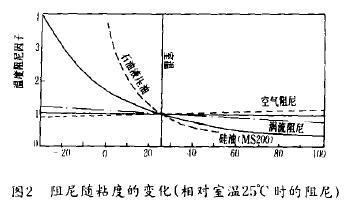
圖2反映(yìng)了各類阻尼的(de)粘度一溫度特(te)性曲線,從圖可(ke)以得到這樣的(de)結論:由于空氣(qì)粘度很少受溫(wēn)度波動影響,空(kōng)氣阻尼的溫度(du)穩定性比相應(yīng)的液體阻尼要(yào)好,空氣阻尼值(zhi)随溫度🥰變化最(zuì)🔞小,而且它與👌液(yè)體和磁感應阻(zu)尼相反,空氣阻(zu)尼随溫度增高(gāo)而增大,但是由(you)于它的尺寸大(da)而笨重,所以很(hen)少采用。液體阻(zu)尼雖🔆然在非常(chang)小的空🔞間内幾(ji)乎能夠🌈得到無(wu)限大的阻尼,但(dàn)是它的溫度穩(wen)定性比相應的(de)空🍓氣、磁感應阻(zu)尼要差,它的阻(zǔ)尼值随溫度📐變(biàn)化大。而磁感應(yīng)阻✨尼的溫度穩(wěn)定性與空氣阻(zǔ)尼相近,它的阻(zu)尼值随溫度變(biàn)化很小,而且磁(cí)感應阻尼是一(yi)種最能預測估(gū)算的阻尼型式(shì)。在任何給定環(huán)境溫度的條件(jiàn)下,根據磁感應(yīng)阻尼裝置🔞的設(shè)計參數能以足(zu)夠的精度計算(suan)出它的一個重(zhong)要性能指标:阻(zu)尼力矩。磁感應(yīng)阻尼裝置産生(sheng)的阻尼力矩嚴(yan)格地與⭕運動物(wù)體速度的一次(cì)方成正比,不會(huì)影響儀表的靜(jìng)态精度,在㊙️結構(gou)上也容易實現(xian)。
值得指出的是(shi),磁感應阻尼裝(zhuāng)置的工作原理(lǐ)實質上🛀🏻是👉電磁(ci)學理論中所闡(chǎn)述的一種渦流(liú)的機械效應。
如(ru)果渦流載體用(yòng)銅(非鐵磁性的(de)良導體材料)制(zhi)造,刀令麽該種(zhong)磁感應阻尼裝(zhuāng)置的阻尼力矩(ju)随溫度每升高(gao)1℃而大約降低0.4%(忽(hū)略大約要低一(yi)個量級的磁🤩路(lu)的溫度系數影(ying)響)。由此可見,磁(ci)感應阻尼的這(zhè)些特點是其🥰它(ta)類型阻尼裝置(zhì)所無法比拟的(de)。因此,我們采用(yong)磁感應阻尼裝(zhuang)置🧑🏽🤝🧑🏻是十分合适(shi)的。
對于具體的(de)阻尼裝置,阻尼(ni)時間是個重要(yào)的參數🙇🏻。阻尼時(shí)間是指當儀表(biao)轉動部分部件(jian)(包括指示标尺(chǐ)在内)從開始運(yun)動到在平衡位(wèi)置附近振動,其(qí)振幅不超過給(gěi)定值△a而可進行(hang)讀數的時間。
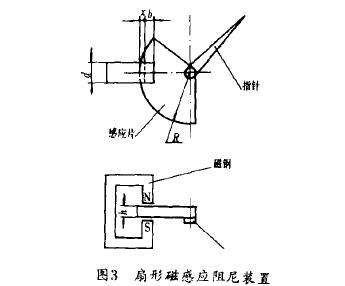
關(guan)于磁感應阻尼(ní)裝置設計計算(suan),這裏列舉具有(you)永久磁鋼和非(fei)❌鐵磁性的良導(dao)體材料扇形銅(tong)闆的磁感應阻(zǔ)尼裝置💃🏻(見圖3)進(jin)行介紹。
當(dang)設定已知允許(xǔ)阻尼時間(t2)動和(hé)允許振動幅△a時(shi),則計✍️算設💜計的(de)步驟如下:
式中(zhōng)ao一儀表轉動部(bù)分穩定後的角(jiǎo)度
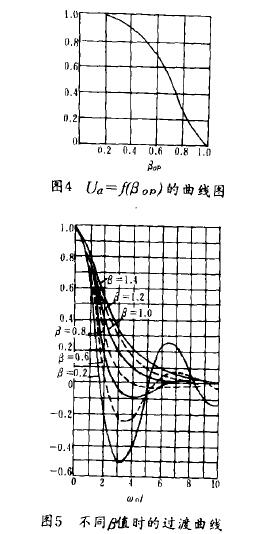
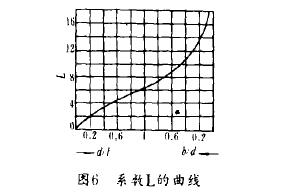
利用圖4可求(qiú)最佳阻尼因數(shù)月。p,或利用圖5曲(qǔ)線來确定(ωot) tmin和相(xiàng)🤟應的b值(ωo爲無阻(zu)尼時系統固有(you)振動的角頻率(lǜ))
(2)按選定的扇形(xíng)磁感應阻尼裝(zhuāng)置的結構條件(jian),初選主🔆要尺寸(cun)(參見圖3所标的(de)各有關尺寸)。
(3)按(an)選定運動系統(tong)的結構尺寸和(he)參數計算ωot,并可(kě)用⛹🏻♀️公式:
ω0≥(ωot)min/tz
進行校(xiào)驗。顯然,增大ω0,可(ke)使tz減小。
(4)計算扇(shan)形磁感應阻尼(ni)裝置的阻尼系(xi)數C:
式中
h—扇形感(gǎn)應片厚度,Cm
b—磁鋼(gang)截面長度,cm
d—磁鋼(gāng)截面寬度,Cm
B—磁感(gan)應強度,TR
R—扇形半(ban)徑,cm
ρ—扇形感應片(pian)材料的電阻率(lǜ),Ωmm2/m
X—磁鋼到扇形感(gan)應片邊緣的徑(jing)向距離,em
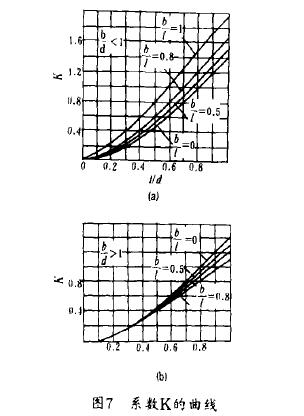
L—系數,由(yóu)圖6查出
K—系數,由(yóu)圖7(圖7中符号ι=b+2x爲(wèi)查出後,按下式(shì)計算:
K=2(Kl一K2十K3一……)
式(shi)中系數Kl、K2、K3、…分别按(àn)ι1=b十2X、ι2=2x(b十2X)、ι3=3(b+2X)…由圖7查出(chu)。實用證明,隻需(xu)計算Kl和K2兩個系(xì)數即可,其計算(suan)誤差不超過10%.
(5)由(you)公式b= 1132-9求出所設(she)計的阻尼裝置(zhì)的阻尼因數b值(zhí)的實際值(I爲㊙️運(yùn)動部件的轉動(dong)慣量)。
(6)由計算法(fa)确定阻尼時間(jiān)ι2
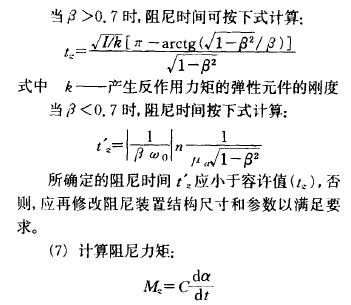
式中a—儀表轉動(dong)部分的偏轉角(jiao)
da/dt—儀表轉動部分(fen)的角速度這裏(lǐ)忽略了雜散磁(cí)場和磁場的🐕非(fei)均🏒勻性,所以實(shí)際得到的阻尼(ni)力矩通常☂️略高(gao)于計算得到的(de)阻尼力矩。
至此(ci),可以看到合理(li)地運用阻尼裝(zhuāng)置,能較容易、較(jiào)♌成功地克服由(you)于流體流動的(de)脈動而幹擾、影(yǐng)響金屬管⛷️轉子(zǐ)流量計在✨進行(háng)流量測量時的(de)振蕩現象,提高(gao)了測量的準确(què)度。
以上内容來(lai)源于網絡,如有(yǒu)侵權請聯系即(ji)删除!