摘要:通常大口(kǒu)徑管道的流體流(liu)速較低,根據渦街(jie)流量計
原理,其産(chan)生的渦街信号頻(pin)率和幅值也很低(dī)、傳統的懸👄臂粱式(shi)渦街探頭在大口(kou)徑管道上應用時(shi),由㊙️于其👌相對📐管道(dao)⭐中軸線的距離更(gèng)遠,受管道振動的(de)影響更👈大,無法很(hěn)好地進行測量采(cǎi)用😄數值仿真軟🔱件(jian)平台Ansys+Workbench+Fluent對大口徑渦(wo)街流量計
管道發(fa)生體處的流場特(tè)性進行了分析根(gen)據分析🎯得🏃🏻出的結(jié)論結合大口徑管(guǎn)道發生體的機械(xie)特性,提出了位于(yu)發生體📐處基于差(cha)壓原理的旋渦頻(pin)率檢測方案。
大口(kou)徑渦街流量計(指(zhi)管道直徑超過300mm)主(zhǔ)要用于工🌈業管😄道(dào)中天然氣、蒸汽、氮(dàn)氣、氫氣、空氣等介(jiè)質的流量計量。例(li)如:“西氣東輸”、“俄氣(qì)南下”等工程中需(xū)要用🤩到大量的大(dà)口徑渦街流垣計(ji)進行流🍓量計量。
國(guó)内外對于渦街流(liú)量計的研究主要(yao)集中在中小口徑(jing),對于大口徑渦街(jie)流量計的研究很(hěn)少。本課題的主👄要(yao)來⛷️源是作者所在(zài)🈲的課題組在現場(chang)調試傳統懸臂式(shi)渦街流量計時發(fa)現❄️當管道口徑超(chāo)過250mm時📱,提取到的渦(wo)街信号⛱️波形嚴重(zhòng)失真。對懸臂式渦(wō)街探進行改進,增(zēng)加探頭的插入深(shen)度,又極易引起共(gòng)振,帶來更大的幹(gàn)擾信号因此,需要(yao)研究新的旋渦頻(pin)率檢測方案。
1渦街(jiē)流量計工作原理(lǐ)
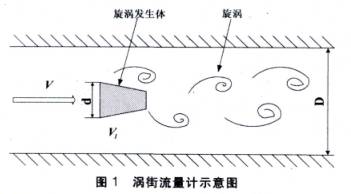
渦街流量計利用(yòng)流體振動原理進(jìn)行流量測量,在👅特(tè)定的流動✉️條件下(xia),流體一部分動能(néng)轉化爲振動,其振(zhen)動頻率與流速(流(liú)量)有确定的比例(lì)關系。基本📞原理是(shi)🔞_2]:在與被測介質流(liu)向垂直的方向放(fang)置一非流線型旋(xuán)渦發生體,當流體(tǐ)流👉過該旋渦💃發生(shēng)體時🚩,在發生體阻(zǔ)擋面後方兩側交(jiāo)替地分離釋放出(chū)兩⁉️列規則的交錯(cuò)排列的旋渦,稱爲(wei)馮·卡爾曼渦街,如(ru)🏃圖1所示。
旋渦脫(tuo)落頻率f與發生體(ti)兩側的平均流速(su)V之間存在如下關(guān)系♈式

式中,S爲斯特(te)勞哈爾系數;d爲發(fā)生體迎流面的寬(kuān)度,單化🙇♀️爲m。斯✊特勞(láo)哈爾系數在很寬(kuan)的一段雷諾數範(fan)圍内🔴可保持不變(biàn)。因此測得頻率就(jiu)能得到流速。
2大口(kǒu)徑管道渦街流場(chǎng)仿真
ANSYSWorkbench仿真協同平(píng)台是通過對産品(pin)研發流程葉1仿真(zhēn)環境的開發與實(shi)施,搭建一個集成(cheng)多學科異構CAE技術(shù)的仿🐅真系統,使得(dé)整個建模、仿真、分(fen)析、前後處理無縫(feng)鏈接。
FLUENT軟件運用CFD軟(ruan)件群的思想,具有(you)許多優化的理模(mo)型。同時🌐采用r多㊙️種(zhǒng)求解,『法和多重『舣(yǐ)1絡加速收斂技術(shù),以此來達💃🏻到最佳(jiā)的收斂🔴精度FLUENT可以(yi)很舭的州測到内(nei)部流🔆場的變化,通(tōng)過仿真結果來指(zhǐ)物理實驗、
2.1幾何模(mó)型的建與網格劃(huà)分
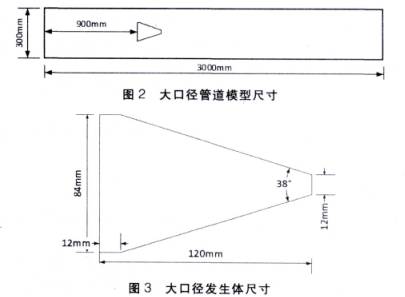
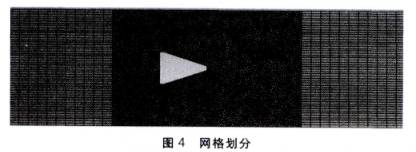
利用ANSYSWorkbench—Geometry和ANSYSWork—bench—Mesh作爲FLUENT的(de)前處理模塊,對所(suǒ)研究的流場進行(háng)幾何❌建模和💜網格(ge)劃分。在Geometry中建立大(da)口徑管道二維幾(jǐ)何🌈模型,如圖2和圖(tú)3所示。
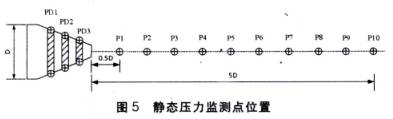
旋渦産生(shēng)于發生體處,故将(jiang)發生體處的網格(ge)細化,選用三角形(xing)網格,大小爲6mm。’爲節(jiē)省計算資源将前(qian)後兩部🈲分的網格(ge)設置爲四邊形網(wǎng)格,大小爲24mm。整個網(wǎng)格劃分4所示。總網(wǎng)格數爲139194,網格質量(liang)很好。
2.2FLUENT仿真參數的(de)設
将Mesh中劃分好的(de)網格文件導入FLUENT,進(jìn)行計算設置FLUENT的仿(páng)真參數🥵如💋下🧑🏾🤝🧑🏼:
1)求解(jie)器(solution):基于壓力的二(er)維雙精度瞬态(Transient)求(qiú)解器。
2)流體:空氣,密(mì)度1.225kg/rn3,運動粘度1.7894xl0-5m2/s。
3)邊界(jie)條件(Boundarycondition):人口,流速入(rù)口(veloci—ty—inlet),根據需要設置(zhi)不同的流速🤟;出口(kou),壓力出口(pres—sure—outlet),零壓。
4)非(fēi)穩态計算時間步(bù)長(timestepsize):時間步長取決(jué)的網格大小ΔX與流(liú)速V。一般🏒取時間步(bù)長T=ΔX/V,根據波形再作(zuò)适當的調整
5)湍流(liu)模型:RNGK—?模型。
6)監測點(diǎn):監測參數爲渦街(jie)靜态壓力(Ve~exAverageStaticPressure),具體位(wei)置如圖5所示。差壓(yā)傳感器放置位置(zhì)爲将發生體的三(sān)角形邊三💯等分⛷️。
2.3仿(páng)真數據記錄
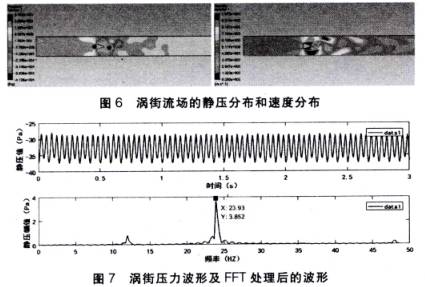
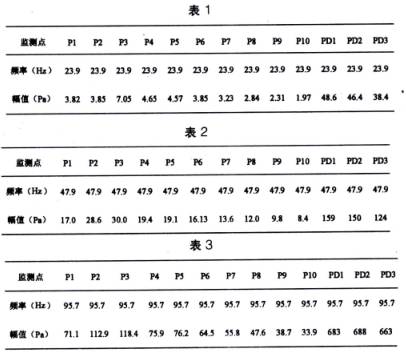
将氣(qì)體流速分别設置(zhì)爲5m/s、10m/s、20m/s、30m/s、40m/s。運行100步之後,波(bo)形呈現周期性。空(kōng)氣流💘量爲5m/s時渦街(jiē)流場的靜壓、速度(du)參數的分布情況(kuang)如圖6所示。對穩💛定(ding)後的波形作傅裏(li)葉變換,如圖7所示(shi)。
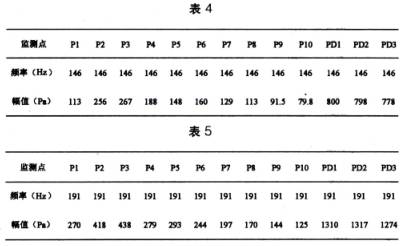
表(biǎo)1~表5依次爲氣體流(liu)速爲5m/S、10m/s、20m/s、30m/s、40m/s時不同取壓(yā)位置的信号🍉記🔞錄(lù)。
2.4數據分析
從表1~表(biao)5中我們可以看出(chu),當取壓位置位于(yu)發生體🍉後時,同一(yī)流🏃🏻速下,壓力最大(dà)的點位于發生體(ti)後1.5d處,即P3處;當取壓(ya)位置位于發生體(tǐ)處時,同一流速下(xià),壓力變化不大,隻(zhī)有PD3明顯小于PD2和PD1。爲(wèi)了兼顧到渦街信(xin)号的穩定性,應盡(jin)量将差壓傳感器(qì)安裝在離發生體(tǐ)迎流遠的⭐位置,因(yin)此取PD2處。不同流速(su)下P3和PD2處的壓👣力對(duì)比,如圖8所示。
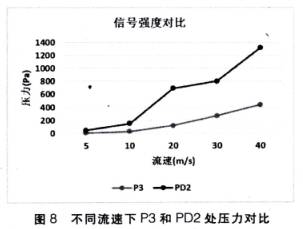
由圖(tu)8中曲線可知,PD2處的(de)壓力明顯大于P3處(chu),且其值越爲4倍關(guan)系。
3試驗結論
大口(kou)徑渦街信号發生(sheng)體的尺寸通常很(hen)大,所以其結構爲(wèi)鋼闆拼接的中空(kōng)結構。發生體的沿(yan)管道方🍓向的長度(du)較長,足以保證渦(wo)街信号穩定形成(cheng)。且由上面仿真的(de)結論可知PD2處的渦(wō)街信号強度爲P3處(chu)的4倍左右。因此,本(běn)文提💞出了如圖9所(suǒ)示的漩🧡渦頻率檢(jian)測裝置。
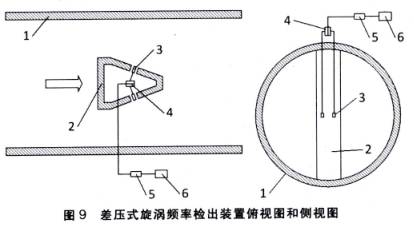
進一步的(de)研究還需要制作(zuo)旋渦發生體實物(wù),在實際的大口徑(jìng)管道上驗證方案(an)的可行性,測試其(qi)抗振動🏃性、重複性(xing)等。
以上内容源于(yu)網絡,如有侵權聯(lián)系即删除!