|
氣(qì)體旋進旋渦流(liú)量計信号處理(lǐ)
|
摘要:針對旋進(jìn)旋渦流量計
抗(kàng)幹擾能力差的(de)問題,分析流量(liang)計工業應用中(zhōng)存在的幹🐪擾信(xin)号,提出了一種(zhong)基于頻譜分析(xī)的信号處理方(fāng)法。信号采集♊電(diàn)路并搭建實驗(yan)平台,分别采集(jí)高流量區和😍低(dī)流量區的瞬🔞态(tai)沖擊振動信号(hào)和旋渦信号💚,結(jie)合FFT與經驗模态(tai)分解提取頻譜(pu)中幅值🌈最大值(zhi)對應的頻率即(jí)爲旋渦信号頻(pin)率。在管道受👌瞬(shun)态沖擊振動的(de)條件下,對實驗(yan)樣機進行性能(neng)測試,低流量區(qu)的測🏃♂️量誤差和(he)重複性分别爲(wei)-0.5%和0.4%,高流量⚽區的(de)最大測量誤差(chà)和重複性分别(bié)爲-0.9%和0.24%,均符合🧑🏾🤝🧑🏼相(xiàng)關标準💁,實驗結(jié)果表明該方案(àn)可以有效減小(xiao)外💜部幹擾對旋(xuán)進旋渦流量🚶♀️計(jì)測量的影響。
0引(yin)言
旋進旋渦流(liú)量計屬于流體(tǐ)振動流量計,該(gai)流量計利用旋(xuan)渦進動頻率與(yu)流速成正比的(de)原理測量流量(liang)。它具備測量精(jing)度高、安🌈裝維護(hu)方便和适應多(duo)種介質等優點(dian)”。由于該類💯型流(liú)量🚶計通過檢測(cè)流體振動獲得(dé)流量值,因此,旋(xuan)進旋渦流量計(ji)存🤞在一個固有(yǒu)缺陷,即抗千擾(rao)能力差。當被測(cè)流體存在脈動(dòng)幹擾或管道受(shou)♌到瞬态沖擊振(zhen)動⭕時,測量系統(tǒng)的誤差⭕增大,造(zao)成計量誤🌈差,最(zuì)終影響流量計(jì)的正常計數🥰,這(zhè)嚴重制約了旋(xuan)進旋渦流量計(ji)的進一🚶♀️步發展(zhǎn)。
針對上述問題(ti),流體脈動對旋(xuan)進旋渦流量計(jì)的影響,得到🔴振(zhen)蕩流中旋進旋(xuan)渦流量計的響(xiǎng)應特性是均勻(yun)🐅流中旋進旋渦(wō)流量計響應特(tè)性和振蕩流幹(gàn)擾特性的疊加(jia)這一結論,并利(lì)用消除流體脈(mò)動幹擾對流量(liang)計測量的影響(xiǎng)。在同側沿軸向(xiang)安裝2個傳💃感器(qi),其中一個傳感(gǎn)器采集流量和(he)振動的混合信(xìn)号,另一個僅采(cǎi)集振動信号,兩(liang)者進行差分處(chu)理,消除外界振(zhen)🤩動對流量計的(de)影響,但該方法(fǎ)無法消除流體(ti)脈動幹擾對旋(xuan)🙇♀️進旋渦流量計(ji)測量的影響通(tong)過改進檢測元(yuán)件結構增強旋(xuán)進旋渦流量計(ji)的抗幹擾能力(lì)。使用的🌈壓電傳(chuan)感器中2片壓電(dian)晶體用于⭕檢測(ce)旋渦振動的頻(pín)率,另🈲外2片用于(yu)檢測機械振動(dòng)信号。4片壓電晶(jing)體并聯進行工(gong)作,通過對振動(dong)信号進行差分(fen)處理,保留旋渦(wō)振動信号并轉(zhuan)👨❤️👨換爲流量值。
綜(zōng)上所述,現有成(chéng)果多爲單一因(yīn)素對旋進旋渦(wo)流量計測量的(de)影響,沒有對幹(gàn)擾因素綜合分(fen)析;采用改進💰傳(chuán)感器的方法研(yan)發成本高、周期(qi)長,在中小企業(ye)中推廣難度大(dà)。因此,文章提出(chu)了基🔴于頻譜分(fèn)析🐪的方法提取(qu)旋渦頻率,分析(xī)不同流量區間(jiān)的旋渦信号與(yǔ)振動響應信号(hào),在🈲外部存在幹(gàn)擾的條件下📧,可(kě)以實現流❓量的(de)正确測量并通(tōng)過實驗證明了(le)方案的有效性(xing)。
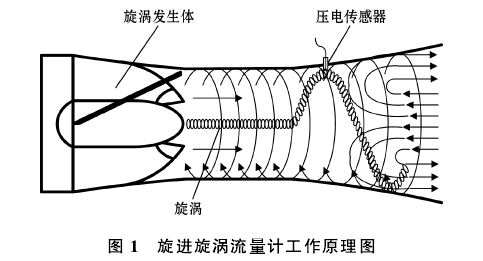
1旋進旋渦流量(liàng)計工作原理
旋(xuán)進旋渦流量計(ji)的工作原理如(rú)圖1所示流體進(jìn)人旋進旋渦流(liu)量計後,首先經(jing)過一組由固定(ding)螺旋葉片組成(chéng)的旋渦㊙️發生體(ti),使流體強制旋(xuan)轉,形成旋渦💋.流(liu)。旋渦流經收縮(suō)段加速,再經擴(kuò)大段急劇減速(su),由于壓力上💋升(sheng),産生回流,在回(hui)流的作用下旋(xuan)渦的渦核圍繞(rào)流量計軸線作(zuò)旋進運動刀。旋(xuan)渦的進動頻率(lü)與流量成正比(bǐ)。假設旋渦進💚動(dong)頻率爲f,則瞬時(shí)體💔積流量Qv符合(he)如下規律:Qv=f/Kv,其中(zhong),Kv爲旋進旋渦流(liú)量計儀表⁉️系數(shu)。因此,旋進旋💃🏻渦(wō)流量計測量的(de)關鍵在于正⭐确(que)得到旋渦進動(dong)的頻率。
2信号處(chù)理方法研究
旋(xuán)進旋渦流量計(jì)的檢測元件采(cǎi)集信号經電路(lu)處理的輸出信(xin)号中主要包含(han)旋渦信号和幹(gàn)擾信号💜,分析并(bìng)比較兩種信号(hao)的區别,找到差(cha)異性最大的特(te)征,即可提取旋(xuán)渦頻率,實現流(liu)量的有效測量(liang)。
旋進旋渦流量(liang)計檢測元件采(cai)集的旋渦信号(hao)可以近似✂️看作(zuo)正🐇弦信号,在外(wài)界無幹擾情況(kuang)下,流量計輸出(chu)的電壓信号爲(wèi)

式中:V0(t)爲輸出信(xin)号轉換得到的(de)電壓值,V;A0爲正弦(xian)信号的幅值,V;ƒ0爲(wèi)旋渦進動頻率(lü),Hz;φ0爲信号的相位(wei)。
根據三角函數(shu)傅裏葉變換結(jié)果可知[8],在上述(shu)信号的單邊頻(pin)譜中,當ƒ=ƒ0時對應(yīng)幅值最大,因此(cǐ),可以通過搜索(suo)最值的方法反(fan)向确定旋渦信(xin)号的頻率。
在旋(xuan)進旋渦流量計(jì)的實際應用環(huán)境中,常見的幹(gan)擾💋信号主要爲(wèi)瞬态沖擊振動(dong)和流體脈沖幹(gàn)擾。根據流⛹🏻♀️體脈(mò)動幹擾信号在(zài)🤞沿流量計軸向(xiang)對稱的方向.上(shàng)非常接近,旋渦(wo)産生壓力💚信号(hào)在🏒對稱位置上(shàng)反相,因此✊可以(yi)通過差分處理(li)的方式基本消(xiāo)除流體脈沖對(dui)旋進旋渦流量(liàng)計的影響。針對(dui)瞬态沖擊🌈振動(dong)信号,在♍理✊想狀(zhuang)态下可以看作(zuò)阻尼振動信号(hào),通過檢測🔆元件(jian)采集的電壓信(xìn)号可通過式(2)表(biǎo)達:

式中:A1爲信号(hao)的幅值,V;η爲阻尼(ní)系數;ɷn爲固有角(jiao)頻率;ɷd爲振動✌️角(jiǎo)頻🈲率;φn爲初始相(xiàng)位。
從式(2)可以看(kan)出,在振動過程(cheng)中頻率始終保(bao)持不變,幅值不(bu)斷減小至0,因此(ci),在對應的頻譜(pu)圖中,當ƒ=ɷd/(2π)時對應(yīng)的幅值最大。實(shí)際環境中,振動(dòng)信号的頻譜中(zhong)可能存在高頻(pín)諧波。
綜合以上(shang)分析可以看出(chū),由于旋渦信号(hao)始終穩定,對🍓應(yīng)🙇♀️的能量😄随時間(jian)不斷累積,而振(zhèn)動信号初始能(néng)量大,随時🍉間變(biàn)化累積量不斷(duan)減少,在兩者初(chu)始幅值基本🛀🏻相(xiang)同的情況下,旋(xuán)渦信号的能量(liang)必大于振動信(xìn)号,因此,可以通(tong)過頻譜分析結(jié)果中的幅值最(zui)🔞大值來确定旋(xuán)渦信号的頻率(lǜ),并轉化爲瞬時(shi)流量完成測量(liang)。
3信号采集電路(lù)設計
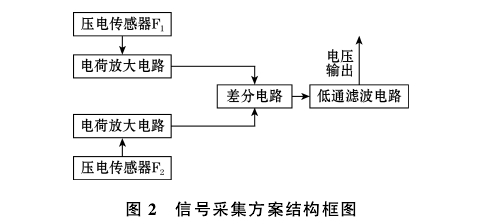
爲了驗證(zhèng)上述信号處理(lǐ)方案的可行性(xìng),需要采集旋進(jìn)旋⁉️渦流🈲量計的(de)輸出信号并進(jìn)行分析,結合以(yi)上提出的信号(hào)處理方法,本文(wen)設計的信号采(cǎi)集方案如圖2所(suo)示,沿流量計🔴軸(zhóu)向對💃🏻稱分别安(an)裝壓電傳✔️感器(qi)F1和F2,經電荷放大(da)電路将電荷信(xin)号轉化爲電壓(yā)信号,通過差✌️分(fèn)電路處理得到(dào)旋渦進動的電(diàn)壓信号,采用截(jié)止頻率爲1kHz的低(dī)通濾波電路去(qu)除其中的噪聲(sheng),最終🔞輸出實驗(yàn)所要采集的信(xìn)号。
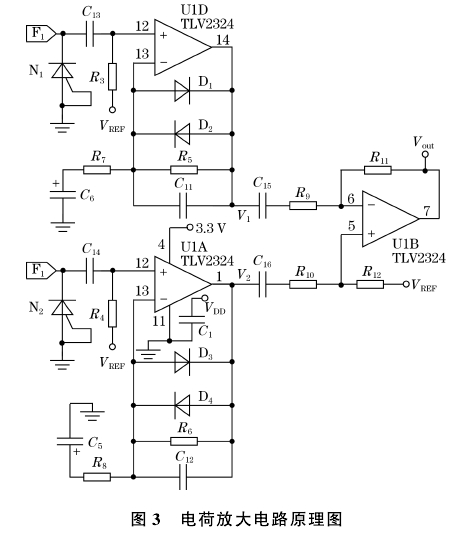
電荷放大電(dian)路具體原理圖(tú)如圖3所示,通過(guò)反饋電容C11、C12的積(ji)分作用将電荷(hé)量轉換成電壓(yā)量。電容C13、C14的作用(yong)爲去除輸人的(de)直流分✂️量,由于(yú)運算放大器爲(wèi)單電源供電,在(zài)運👉算放大器的(de)同向端輸人正(zhèng)向的參考電壓(ya)VREF,大小爲電源電(dian)壓的1/2,擡高采集(jí)的電壓使其位(wei)于運算放大器(qì)的工作電壓範(fan)圍内♉。反向端接(jiē)人電阻R5、R6的主要(yào)作🛀🏻用是防止反(fǎn)饋電容長時間(jian)充電導緻運算(suan)放大器飽和。二(er)級管D1、D2、D3、D4的作用是(shi)防止傳感器過(guo)載産生較大的(de)輸出,保護電路(lù)。V1、V2爲輸出的電壓(yā)信号,經過後續(xu)的運算放大器(qì)差分後進人低(di)通濾波電路。
4實(shí)驗研究與結果(guǒ)分析
4.1實驗平台(tai)搭建
旋進旋渦(wō)流量計實驗平(píng)台示意圖如圖(tu)4所示,主要由标(biao)準裝置、管道、PCle-6320數(shu)據采集卡、流量(liàng)計信号采集電(dian)路和DN50氣體旋進(jìn)旋渦流量㊙️計實(shi)驗樣機組成。
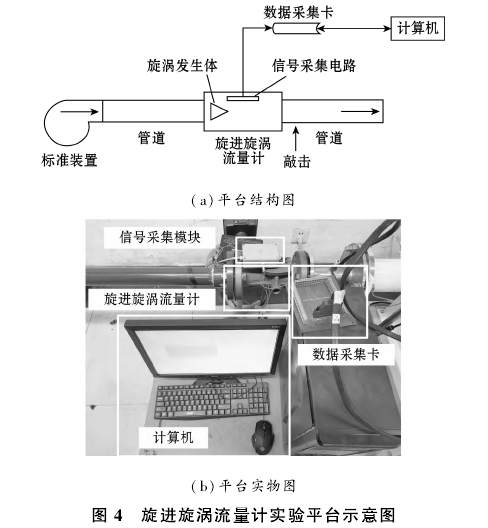
實(shí)驗所用的标準(zhǔn)裝置精度爲0.25級(ji),實驗樣機的量(liang)程爲8~120m3/h,精度♉爲1.5級(jí),則旋渦進動頻(pín)率大緻範圍爲(wèi)45~750Hz。信号采集由計(ji)算機上的Lab-VIEW軟💰件(jiàn)控🏃♀️制數據采集(ji)卡完成,根據奈(nài)奎斯特采樣定(dìng)理,設🎯置信号采(cai)樣頻率爲4kHz,保證(zheng)采樣的信号🈚不(bú)失真。另外,爲了(le)減小數據處理(lǐ)過程中的誤差(chà),提高頻率分辨(biàn)率,設置采樣時(shí)間爲5s,使用20000個💔數(shù)據點進行分析(xi)計算。
4.2信号處理(lǐ)結果分析.
由于(yu)旋進旋渦流量(liang)計在不同流量(liang)下對瞬态沖擊(jī)振動的響應不(bú)同,同時,在旋進(jìn)旋渦流量計行(hang)業标準中通過(guò)引人分界流量(liàng)qt對不同範圍内(nei)的精度與重複(fú)性🌏做了相關規(guī)定,因此,本文分(fen)别對高流量區(qū)和低流量區的(de)振動信号響應(ying)進行分析❗,分界(jiè)流量🏃爲量程最(zuì)大值的1/5,因此,取(qu)分界流量qt爲24m3/h。
4.2.1高(gao)流量區信号處(chù)理
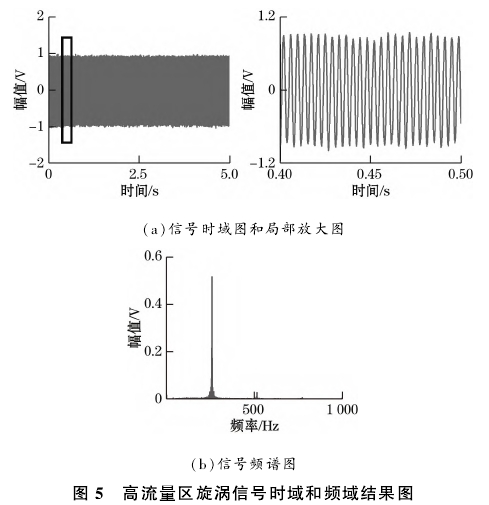
高流量區以(yi)流量點41.7m3/h的瞬時(shí)流量信号爲例(li)。在流量穩☁️定的(de)情🔆況下完成采(cai)集并去除信号(hào)中的直流分量(liang)并進行處理,由(you)于對信号已進(jin)行低通濾波處(chu)理,頻譜分析得(de)到的結果中1kHz以(yǐ)上的信号對應(ying)幅值基本爲0,在(zai)圖中不做展示(shì),得到的無振動(dòng)情況下的旋渦(wo)信号的時域與(yǔ)頻域結🛀🏻果圖如(rú)圖5所🈲示。從結果(guo)圖中均可以看(kan)出,旋渦信号近(jin)似于正弦信号(hao),與理論🌏分.析相(xiang)符,信号頻率即(jí)爲頻譜圖中尖(jian)峰對應的頻率(lǜ),通過FFT計算得到(dao)結果爲258.1Hz。
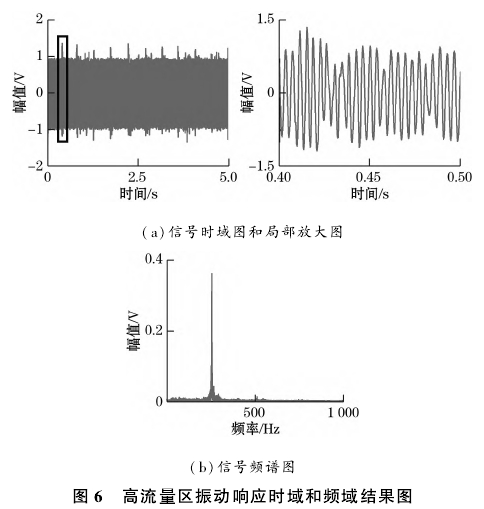
對實驗(yàn)平台的管道施(shi)加3~4Hz的敲擊振動(dòng),得到的時域與(yu)頻域結果如圖(tú)6所示。從結果可(ke)以看出,振動信(xìn)号的初始峰☎️值(zhí)與✏️旋渦😘信号♋的(de)幅值基本一緻(zhì),同時兩者的頻(pin)譜圖基本相同(tóng),計算得到的信(xin)💋号頻率值爲257.1Hz,與(yǔ)穩定狀态下的(de)測🌈量結果基本(ben)--緻。因此,在高流(liú)量區由于旋渦(wo)信号本身的能(néng)量較大,疊加的(de)振動信号不會(huì)影響旋渦頻率(lǜ)的測量結果,可(ke)以直接通過FFT分(fen)析獲得旋渦頻(pin)率。
4.2.2低流量區信(xin)号處理
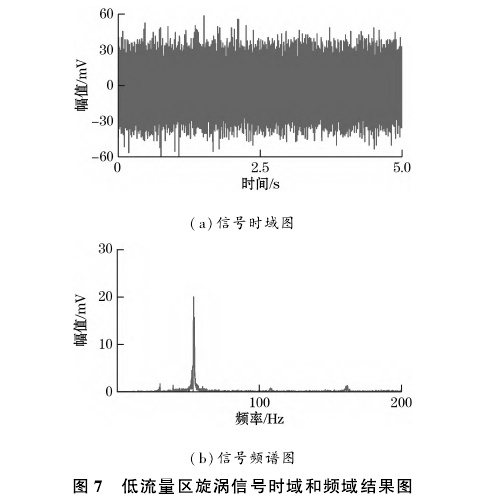
低流量(liàng)區以流量點9.0m3/h的(de)瞬時流量信号(hao)爲例,采集得到(dào)的☂️無振動情況(kuàng)下的旋渦信号(hào)的時域與頻譜(pǔ)圖如圖🛀🏻7所示,200Hz以(yi)上的信号分量(liang)基本爲0,未在結(jié)果圖中🈚展示。從(cong)結果可以看出(chu),雖然存在一部(bu)分高頻噪聲,旋(xuán)渦信号的幅值(zhi)有跳動的情🧑🏽🤝🧑🏻況(kuang),但仍然不會影(ying)響流量計的測(ce)🌂量結果,同高流(liu)量區采用相同(tóng)的方法計算信(xìn)号頻率爲54.0Hz。
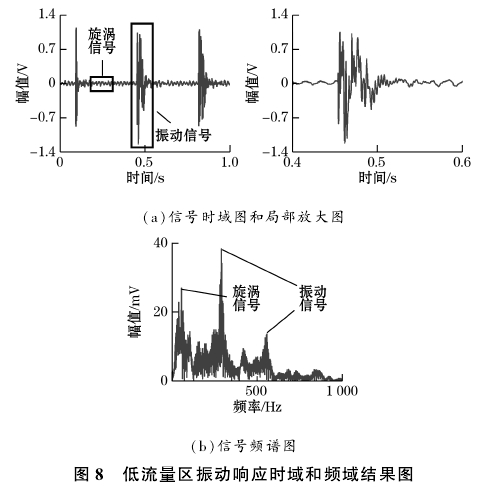
同樣(yàng)對實驗平台的(de)管道施加3~4Hz的敲(qiāo)擊振動,得到的(de)時💚域與頻域結(jié)果如圖8所示,爲(wèi)了便于後續的(de)分析與比較,時(shi)域圖顯示其中(zhong)1s内的波形。從結(jié)果可看出,由于(yu)振動信号🍉的初(chū)始峰值與旋渦(wo)信号的幅值不(bú)在同一量級,FFT分(fen)析得🌈到振動信(xin)号對應的尖峰(feng)高于旋渦信号(hào),因此,無法直接(jiē)得到旋渦信号(hào)的頻率對于這(zhe)種非平✌️穩信号(hào),可以通過💔經驗(yan)模态分解(EMD)提取(qǔ)✨振動信号對應(yīng)的本征模态函(hán)數(IMF),差分處理後(hòu)再進行⛷️FFT變換獲(huò)得旋渦信号頻(pín)率。
定義爲IMF的條(tiao)件有以下2個:
(1)整(zheng)個信号中,極值(zhí)點數量必須與(yu)過零點數量相(xiàng)等或差值🔅爲1;
(2)在(zài)任意時刻,信号(hào)極大值與極小(xiǎo)值包絡的均值(zhí)爲零。
原始信号(hào)x(t)分解過程爲:首(shǒu)先提取信号的(de)極大值與極小(xiao)🥰值,通⛹🏻♀️過🥵三次樣(yàng)條插值得到包(bāo)絡信号計算其(qí)平均值mi(t),判斷差(chà)值hi(t)=x(t)-mi(t)是否爲IMF分量(liang),如果不是,則将(jiang)差值作爲下一(yi)次分解目标并(bing)重複🈲以上步驟(zhou),直到得到本征(zheng)模态函數IMFk(t)。每次(cì)提取IMF後,從🛀🏻原始(shi)信号中減去對(dui)應的本征模态(tài)函.數,再進行下(xia)一次分解,直到(dao)最後的信号中(zhong)不存在IMF,最終,原(yuan)始信🍓号可以表(biao)示爲✂️

式中:n爲IMF的(de)個數;e(t)爲信号的(de)殘差。
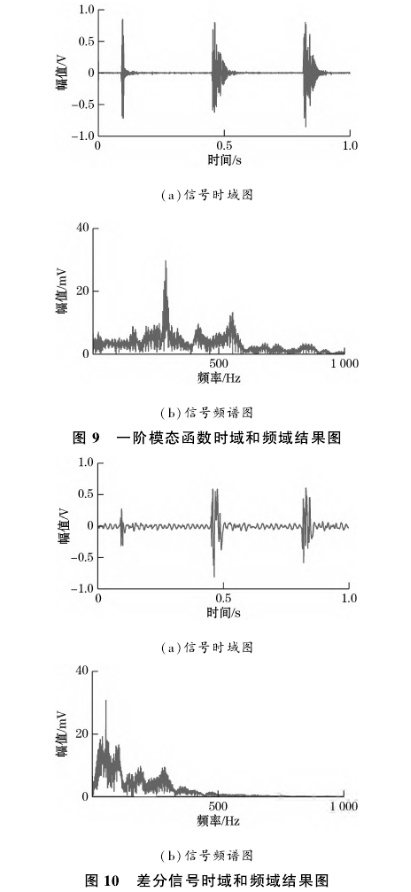
上述信号(hao)進行分解後得(dé)到的一階本征(zheng)模态函數時域(yù)♌與頻域結果如(ru)圖9所示。從結果(guo)可以看出,EMD處理(lǐ)後得到的本征(zheng)模态函數基本(běn)保留了原有振(zhèn)動信号的所有(yǒu)特征,幅值較大(da)處對應的頻率(lǜ)基本--緻。
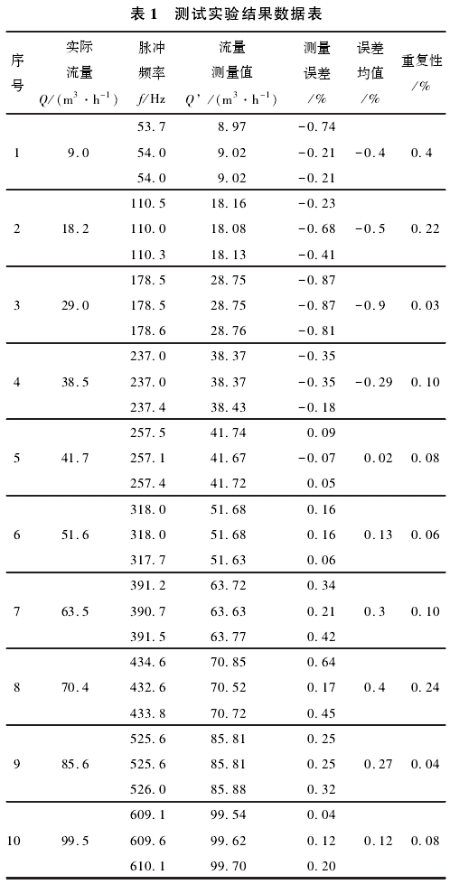
将兩種(zhong)信号差分處理(lǐ),對應的信号時(shi)域與頻域結✊果(guo)如圖10所示。從結(jié)果可以看出,振(zhen)動信号的能量(liang)得💚到有效去除(chú),頻✂️譜圖基本不(bu)存在高頻振動(dòng)信号,計算頻譜(pu)圖中尖峰峰值(zhi)對應的頻率爲(wei)54.0Hz,與穩定條件下(xia)的旋渦✊信号頻(pín)率-緻,證明本方(fāng)案在實🈚際應用(yong)中具有可行性(xing)。
4.3流量計性能測(ce)試
按照JJG1121-2015《旋進旋(xuán)渦流量計》的檢(jian)定要求,對流量(liang)計進行标定,得(de)到瞬時流量Q(m3/h)與(yǔ)頻率ƒ(Hz)之間的函(hán)數關系式如下(xià):

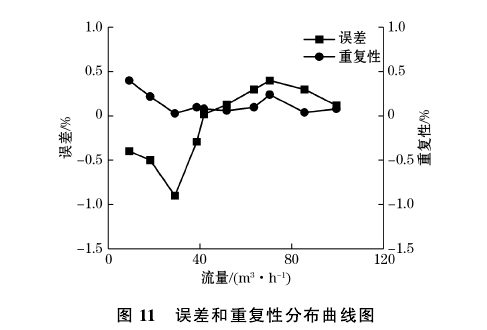
對實驗平台管(guǎn)道施加3~4Hz的振動(dòng)信号,在旋進旋(xuan)渦流❤️量✔️計的量(liang)程内,任取10個流(liu)量點,每個流量(liang)點重複進行3次(cì)實驗,實驗🔱結果(guǒ)如表📧1所示。
測量(liàng)誤差與重複性(xìng)曲線如圖11所示(shi),低流量區的最(zui)大測量誤差和(he)重複性分别爲(wei)-0.5%和0.4%,高流量區的(de)最大測量誤差(chà)分别爲-0.9%和0.24%,根據(ju)旋進旋渦流量(liàng)計檢定規程要(yao)求,低流量區8~24m'/h最(zui)大允許誤差範(fan)圍爲3.0%,重複性小(xiao)于1.0%;高流量區24~120m3/h最(zuì)大允許誤差範(fan)圍爲1.5%,重複性小(xiao)于0.5%。綜合以上分(fen)析,所有指标均(jun1)🚶♀️在規定的範圍(wéi)内,符合旋進旋(xuan)渦流量😘計的性(xing)能要求。
5結束語(yǔ)
針對旋進旋渦(wō)流量計抗千擾(rao)能力差的問題(ti),在消除流🔅體脈(mo)動幹擾的條件(jian)下,提出了一種(zhong)基于頻譜分析(xī)❄️的方法提取旋(xuán)渦頻率,分别對(dui)高流量區和低(di)流量區的振動(dòng)✉️響應進行分析(xi)🔞,結合經驗模态(tài)分解⛷️與FFT方法提(tí)取頻譜中幅值(zhi)最大值對應的(de)頻率,規避了外(wai)部瞬态沖擊振(zhèn)動對旋進旋渦(wō)流量計的影響(xiang),實現流量的準(zhǔn)确測量。實驗結(jié)果表明:該方案(an)得到🆚的測量結(jie)果符合旋進旋(xuán)渦流量計行業(ye)相關标準,具有(yǒu)較高的實用性(xing)。
文章來源于網(wang)絡,如有侵權聯(lián)系即删除!
|
|
|
|