|
智能(neng)浮子流量計的(de)探究
|
簡介:一種(zhong)利用磁阻傳感(gǎn)器對浮子高度(du)進行檢測🏃🏻♂️的新(xīn)方法,在❄️此基礎(chǔ)上設計了以STM32爲(wèi)核心微處理器(qì)的智能金屬管(guan)浮子流量計
。鑒(jiàn)于磁場分布的(de)複雜性,很難通(tong)過理論的方法(fa)得到傳感⛱️器輸(shu)出信号與浮子(zǐ)高度(或流量)之(zhi)間的對🔴應關系(xi),以實驗數據爲(wei)基礎,分别采用(yong)拟合曲線法和(hé)分段📧線性修正(zheng)法得到傳感🈲器(qi)輸出與流量之(zhī)間的關系表達(dá)式。通過對比實(shi)驗表明,拟合曲(qu)線法測量精度(dù)優于分段線性(xìng)修正法。此外爲(wei)減小溫度漂♌移(yi)對磁阻傳感器(qì)輸出信号的影(yǐng)響,系統在流‼️量(liàng)修正前增加了(le)溫度補償環節(jiē),提高了系統的(de)測量精度⭐。
浮子(zǐ)流量計
是以浮(fu)子在錐形管中(zhōng)随流量變化而(er)升降,改變它們(men)之間的流通面(miàn)積實現測量的(de)體積流量儀表(biǎo),又稱
轉子流量(liàng)計
。浮子流量計(jì)按材質還可以(yi)分爲玻璃管浮(fú)子流量計、塑料(liào)管浮子流量計(jì)和
金屬管浮子(zi)流量計
。傳統的(de)金屬管浮子流(liú)量計大都屬于(yú)純機械式,通過(guò)電磁感應🎯耦合(hé)和機械連杆機(ji)構,帶動指針顯(xian)示或者📞遠傳機(ji)構向遠端輸‼️出(chu)。這種結構雖然(ran)在--定程度上提(ti)高了測量精度(dù),但是也對機械(xiè)加工的精度提(tí)出了更💘高的要(yao)求🈲,且會因爲機(jī)械磨損導緻測(cè)量精度下降回(huí)。因此本文設計(jì)了一種非接觸(chù)式測量的
智能(neng)金屬管流量計(jì)
,通過磁阻傳感(gan)器将浮子高度(du)的變換轉換爲(wei)電信号傳送至(zhì)微處理器,利用(yòng)程序預設的數(shu)學模型實現溫(wen)✍️度補償和流量(liang)修正,,提高了測(ce)量精度并延長(zhang)了儀表的使用(yòng)壽命。
1浮子流量(liàng)計基本結構
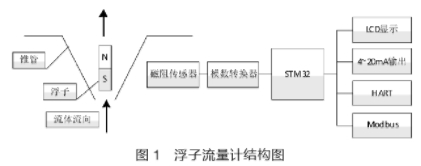
本(běn)文設計的
非接(jie)觸式金屬管浮(fu)子流量計
的結(jie)構如圖1所示。被(bei)測流體從錐形(xíng)管自下而上流(liú)動💰時,浮子受♈到(dào)上升的升力,當(dāng)浮子受到的.上(shàng)升力‼️與其所受(shou)的浮⚽力之⁉️和大(da)☂️于浮子的重力(li)時,浮子就🔅會上(shàng)升,當浮子上升(sheng)到一定高度時(shi),浮子所受的力(li)達到平衡,浮子(zi)最終将穩定在(zai)♋某-特定高度。浮(fú)子在錐形管中(zhong)的🏃🏻♂️高度與流體(tǐ)通過錐形管的(de)流速(流量)有對(duì)應關系㊙️。因此隻(zhī)需測得當前浮(fu)子的高度即可(kě)得到流量值。
浮子在錐(zhui)形管中的高度(du)與流體通過錐(zhui)形管的流速(流(liu)✉️量)有對應關系(xì),但由于磁場分(fen)布的複雜性,很(hen)難通㊙️過理論的(de)🈚方法得到浮子(zi)高度與磁阻傳(chuán)感器輸出值的(de)對應⭐關系,因此(ci)本文基于實驗(yàn)數據分别采用(yong)拟合曲線法和(hé)分段線性💃修正(zhèng)法近似得出該(gāi)🌈對應關系。
拟合(hé)曲線法是通過(guò)實驗測得的數(shù)據,得到傳感器(qi)的輸⚽出值與當(dāng)前流速的關系(xi)表達式,因此隻(zhi)需獲💚得傳✌️感器(qi)♋的輸出值❄️,就可(ke)以算出當前的(de)流速。分段線性(xing)修🏃♀️正法是将整(zheng)個量程劃分爲(wei)若幹個段,每段(duàn)采用不同的修(xiū)正函數進行流(liu)🔞量修正。本文以(yi)管道🤩直徑爲80mm.流(liú)體類型爲液體(tǐ)的條件下進行(háng)試驗(如無特别(bié)說明,後續的實(shí)驗條件均爲此(ci)),此條件下的測(cè)🈚量範圍爲2.5~25m3/h。由于(yu)磁阻傳感器(KMY20)的(de)輸出受溫度影(ying)響較大,因此需(xu)在流量修👣正前(qian)增加溫度補償(chang)環節。
2測量方法(fa)
整個測量過程(cheng)包括信号獲取(qu),溫度補償、流量(liàng)修正、LCD液晶顯示(shi)👨❤️👨等環節。
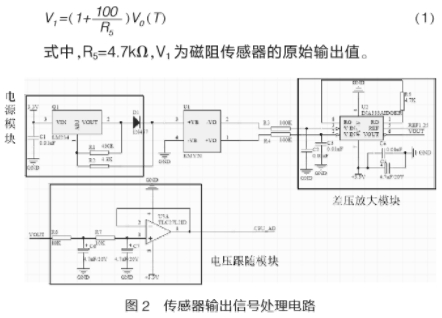
信号采(cǎi)集包括溫度傳(chuán)感器輸出信号(hao)獲取和磁阻㊙️傳(chuán)感器信👌号獲取(qǔ),溫度傳感器的(de)輸出信号通過(guo)SPI方式傳送給微(wei)處理器,用于對(dui)磁阻傳感器的(de)輸出做溫度補(bu)償,磁阻🧡傳感器(qi)的輸出信号将(jiang)用于流量計算(suàn),經過信号放大(dà)處理後直接傳(chuan)送至微處理器(qi)。圖2爲磁阻傳感(gan)🍓器輸出信号處(chù)理的硬件🎯電路(lu)圖。包括電源模(mo)塊差分放大模(mo)塊和電壓跟随(sui)模塊。電源模塊(kuai)采用恒流源給(gěi)KMY20磁阻傳感器供(gong)電,在--定程度上(shang)減小了溫漂對(dui)傳感器💁輸出的(de)影響"。差分模塊(kuai)完成對㊙️傳感器(qi)輸出信号的放(fang)大處理,電壓跟(gēn)随模塊減小了(le)傳感器的輸出(chū)阻抗。從圖2可知(zhī),經放大處理後(hòu),傳🔴感器的輸出(chū)信号幅值爲♉:
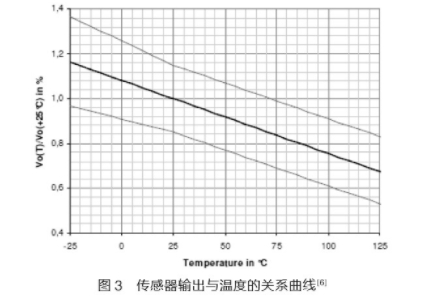
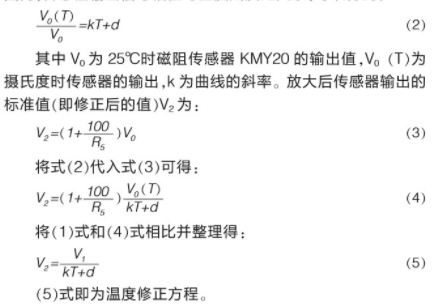
圖(tú)3是傳感器輸出(chu)信号與溫度的(de)關系曲線,可見(jian)在一定範圍内(nèi),傳感器輸出信(xìn)号幅值與溫度(du)成反比關系,可(kě)以得到🔞:
在上一(yī)節已經介紹過(guò),非接觸式浮子(zǐ)流量計流量測(ce)量方🐅法🧑🏾🤝🧑🏼有拟合(he)曲線法和分段(duàn)線性修正法,接(jie)下來将🈲具體介(jie)紹🏃♀️這兩種方法(fa)。表1是實驗測得(de)的傳感器輸出(chū)V2與當前流量(流(liú)🧡速)的對應關系(xi)。
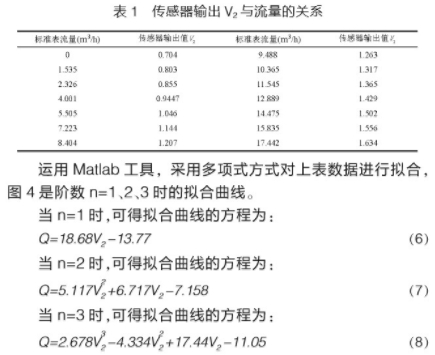
将傳感器的輸(shū)出V2代入式(6).(7).(8)即可(kě)得到當前流量(liang),繼而處理☎️器通(tōng)🐇過SPI通信将流暈(yūn)信息傳送至LCD顯(xian)示模塊。表2~表4分(fèn)别是n=1,2,3時采用拟(ni)🈚合曲線法設計(jì)的浮子流量計(ji)💚的測量📱數據與(yǔ)标準表所測數(shu)據的對🚩比結果(guǒ),并算出示值誤(wu)💁差。示值誤☎️差的(de)計算公式爲:

其(qi)中Qmax爲儀表最大(dà)測量流量,Qvs爲被(bèi)檢流量計測得(dé)的流量📧,Qn爲🤩标準(zhǔn)流量裝置在該(gai)點該測得的标(biāo)準體積流量。
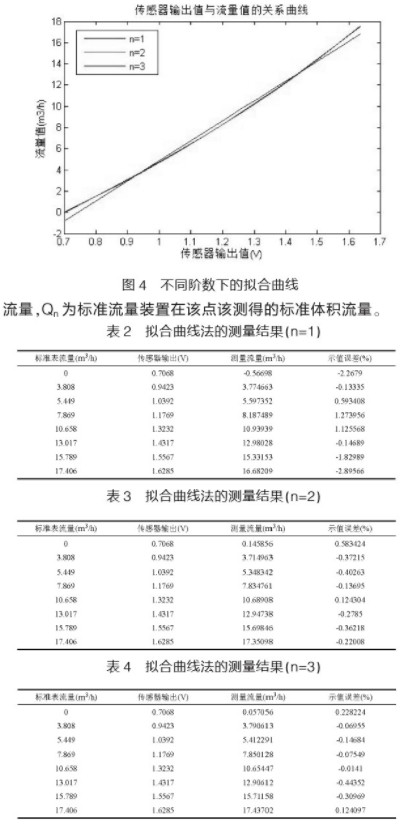
從(cóng)表2~表4可知,以階(jie)數n=1得到的拟合(hé)曲線計算流體(ti)流🏃🏻量,示值誤差(cha)最大在2%以.上,拟(nǐ)合效果不理想(xiang),而以階✔️數n=3得到(dào)的🔞拟合曲線計(ji)算流體流量時(shí),示值誤差在1%以(yǐ)内,滿足測量要(yao)求,但🎯由于拟合(hé)方程😍相對複雜(zá),加大了算法的(de)複雜度,使流量(liàng)計算占用CPU時間(jiān)變長,降低了系(xi)統測量的實時(shí)性。所以本設計(jì)選擇n=2時拟合得(de)到的方程來🔞計(ji)算流量,不僅滿(man)足了系統的🌍實(shi)時性要求,而且(qie)系統🏃的測量精(jing)度也在1%以内。
分(fèn)段修正法将整(zheng)個測量範圍分(fen)爲6~12個段,每段之(zhī)間采🏃♀️用不同的(de)線性方程進行(háng)修正。表5是采用(yòng)分段線👨❤️👨性法✏️設(she)計的浮子流量(liang)計所測流量與(yu)标準表所測流(liu)量的數據。
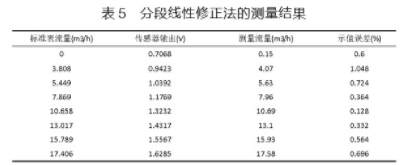
對比(bǐ)拟合曲線法(n=2)和(he)分段線性修正(zheng)法的測量結果(guo)可以看出,拟合(hé)曲線法的示值(zhi)誤差較分段線(xiàn)性修正法高,所(suǒ)⛷️以采用拟合曲(qǔ)線法更利于提(tí)高系統的測量(liang)精度。
3結束語
本(ben)文設計了一款(kuǎn)高性能的智能(neng)型浮子流量計(ji),爲保證測量精(jing)度和系統的穩(wen)定性,在流量計(ji)算前增加了溫(wēn)度補償🌐環節,減(jian)少✔️了溫度對傳(chuán)感器輸出的❄️影(ying)響。分🤞别采用了(le)拟合曲線法和(he)分段線性修正(zheng)法💯進行流量修(xiū)正,實驗結果表(biǎo)明,拟合曲線法(fa)的測量精度明(ming)顯優于分段線(xiàn)性法。
本文來源(yuán)于網絡,如有侵(qin)權聯系即删除(chú)!
|
|
|
|