摘(zhāi)要:針對現有(yǒu)勵磁方式的(de)缺陷,提出了(le)一種新型的(de)☁️三值正弦矩(jǔ)形波勵磁方(fang)式,采用具有(yǒu)16位ADC采集模塊(kuài)的MSP430F4793單片🐪機作(zuo)🌍爲MCU,構建了電(diàn)磁流量計
樣(yang)機。新型勵磁(cí)方式的特點(dian)并介紹了軟(ruan)、硬件設計。試(shi)驗結果表明(ming),新型勵磁方(fāng)式有效地提(tí)高了信号的(de)穩定性,克服(fú)了矩形波勵(lì)磁方式帶來(lai)的微分幹擾(rǎo)難題,也解決(jue)了正弦🏃🏻波勵(li)磁中的正交(jiāo)幹擾的影響(xiǎng),減小了測量(liàng)誤差,對小流(liú)速階段的測(cè)量精度改🌈善(shan)明顯。
電磁流(liu)量計是随着(zhe)電子技術的(de)應用而發展(zhan)起來👉的新型(xíng)流👉量測量儀(yí)表,現已廣泛(fan)應用于各種(zhong)導電液體🏃♀️的(de)流量測量。但(dàn)是在測量以(yǐ)下液體時仍(réng)然存在困難(nán):①低電導率的(de)液體;②低流速(sù)液體;③含有顆(ke)粒的高濃度(dù)漿狀液體;④黏(nian)性液體。通過(guo)改進勵⚽磁方(fāng)式來提高信(xin)噪比是解決(jué)這些問題有(yǒu)效方法之一(yī).
激磁技術是(shì)電磁流量計(ji)中最關鍵的(de)技術,其經曆(li)了直🙇♀️流激磁(ci)、工頻正弦激(jī)磁、低頻矩形(xing)波激磁、三值(zhí)低頻🐇矩形波(bō)激磁、雙頻矩(ju)形波激磁等(deng)5個階段(4-51。直流(liú)激磁方式由(you)于在小流量(liàng)測量時要求(qiu)信号的直流(liu)✂️穩定度必須(xū)在幾分之一(yi)微伏🔱之内,而(er)使得它的應(yīng)用範圍受限(xiàn);工頻正弦激(jī)磁方式由于(yú)電磁感應造(zào)⭕成幅值與頻(pín)♌率成正比,從(cong)而産生了相(xiang)位比流量信(xìn)♉号滞後90的🔅正(zhèng)交幹擾;低頻(pin)矩形波激💰磁(cí)、三值低頻矩(ju)🔞形波激磁和(hé)雙頻矩形波(bo)激磁這三種(zhong)激磁方式會(hui)👌不同程度🏃的(de)在電平快速(su)切換時而引(yin)入微分幹擾(rǎo)等難題。
本文(wén)提出了一種(zhong)新型的勵磁(ci)方式一三值(zhi)正弦矩形波(bo)🔴勵🧑🏽🤝🧑🏻磁方式,它(ta)不僅克服了(le)微分幹擾的(de)難題,而且解(jie)決了正交幹(gàn)擾的影🐅響。基(ji)于此勵磁方(fang)式,采用具有(you)16位A/D轉換模塊(kuai)的MSP430F4793單片機作(zuo)爲MCU,設計了一(yi)款具有♻️穩定(ding)性和測量精(jīng)度的電磁流(liú)👅量計。
1勵磁方(fāng)式分析
1.1測量(liang)原理
電磁流(liu)量計的測量(liàng)原理爲法拉(la)第電磁感應(yīng)定律,如圖🏃1所(suo)☀️示。當流體在(zai)管道内流過(guo)一個橫向磁(cí)場B的時候,相(xiàng)當☂️于有一定(dìng)電導率的導(dǎo)體在切割磁(cí)力線💋,形成電(dian)動勢E,其大小(xiao)與磁場B、流速(su)和管🌈徑D成正(zhèng)比,如公式(1):
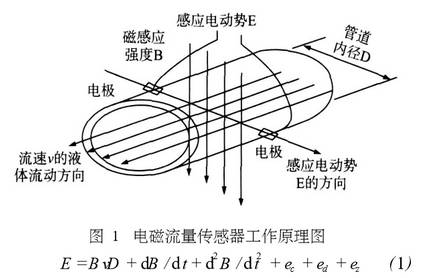
其中B?D爲(wei)流速信号,即(jí)真實測量值(zhí)。dB/dt爲微分千擾(rao),它主要源于(yú)變壓器效應(ying)其大小與流(liu)量無關,即使(shi)是在🌂流速⭐等(deng)于零,沒有流(liu)量信号感應(yīng)[14]的情況下也(ye)會存在,是電(dian)磁流量計的(de)主要幹擾D2B/dt2爲(wèi)同相👌幹擾,是(shì)微分幹擾的(de)二✔️次微分得(dé)㊙️到的,所以隻(zhi)要盡量降低(dī)微分幹擾,同(tong)相幹擾也會(hui)降低。ec、ed和ez分别(bié)是共模幹擾(rǎo)、串模✔️幹擾和(hé)直流極化電(dian)壓,均爲電磁(cí)流量計的次(ci)要幹擾源
1.2三(san)值正弦矩形(xíng)波勵磁方式(shì)
對于當前廣(guǎng)泛應用的矩(jǔ)形波勵磁方(fāng)式來說,由于(yú)正🧡負值勵磁(cí)狀态的瞬間(jiān)跳變,造成在(zài)切換點的磁(ci)場變化率dB/dt趨(qu)于無窮大波(bo)🤩形上表現爲(wèi)一個尖峰),形(xíng)成的微分幹(gan)擾極大,足以(yi)使得前級放(fàng)大器達到飽(bǎo)和,導緻信号(hao)穩定性的降(jiàng)低,信号如圖(tu)3(a)所示。
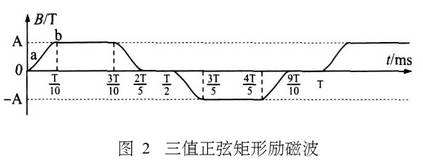
對當(dāng)前矩形波勵(lì)磁方式改進(jìn)後提出了一(yi)種新型的三(san)💛值正🙇🏻弦矩形(xing)波勵磁方式(shì),波形如圖2所(suǒ)示,數學表達(da)式如式(2)。
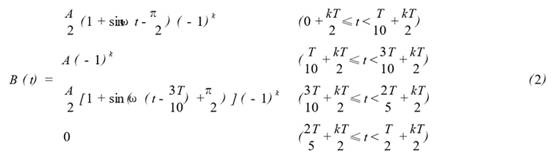
式中(zhōng)k爲自然數,T爲(wei)一個波形周(zhou)期。在零值與(yǔ)正、負電平♻️的(de)切換過程中(zhong)加入了正弦(xian)波段作爲過(guò)渡,使得勵磁(cí)信号變得相(xiàng)對平滑。選取(qǔ)的正弦波上(shang)升沿、平台、正(zhèng)弦波下降沿(yan)和零值的時(shi)間比爲🐕1:2:1:1。
0-T/2這段(duan)正弦波_上升(shēng)沿可知,波形(xíng)段内的磁場(chǎng)變化率dB/dt=(2π?)4cos(?t-π/2)/2,是💁連(lian)🤟續平穩變化(hua)的,幅值在0-π?A之(zhi)間,其中?爲勵(lì)磁頻率🏒。端點(dian)☀️a右側dB/dt=A?cos(-π/2)/2=0,左側㊙️磁(cí)場🈲變化率爲(wei)0,兩者相等。端(duān)點b右側dB/dt=0,左側(cè)dB/dt=A?cosπ/2)/2=0,亦相等。因此(cǐ),在兩端點處(chu)的磁場變化(huà)率也是連續(xù)的,沒🌈有發生(sheng)跳變。同理推(tuī)❌得,整個周期(qī)内其餘正弦(xián)波段的✊磁場(chǎng)變化率都是(shì)連續的🚶♀️,這樣(yang)就有效地降(jiàng)低了微分幹(gan)擾,抑制了尖(jiān)‼️峰,提升了信(xìn)号的穩定性(xing),使得電磁流(liú)量計在小流(liu)速測量階段(duan)也能夠達到(dao)較好的測量(liang)精度。
在正、負(fu)勵磁波段,由(you)于磁場強度(du)恒定,微分幹(gan)擾和同相幹(gàn)擾都很微弱(ruò),所以在這個(gè)階段對感應(ying)電動勢進行(háng)采樣,能夠取(qǔ)得較爲穩定(ding)的幅值,從而(ér)提高🔆了測量(liang)的精度。同時(shí),利用零值勵(li)磁階段的電(dian)極信号來動(dong)态㊙️補償在正(zhèng)💋、負勵磁階段(duan)的感應電動(dong)勢信号中的(de)零點部分,減(jian)小了零點漂(piāo)移,增💃加了零(líng)點穩定性。
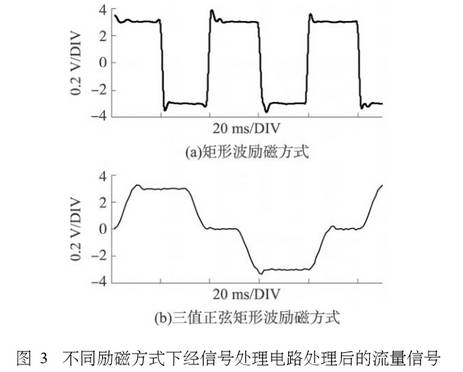
考慮(lü)到工頻幹擾(rao),波形的周期(qī)要爲工頻周(zhōu)期的[17]整⛹🏻♀️數倍(bèi),而我國的市(shì)電工頻幹擾(rǎo)的頻率爲50Hz,所(suo)以選取頻率(lü)?爲5Hz的波形🔞,這(zhè)樣在一個200ms的(de)周期内工頻(pin)幹擾的正負(fu)面積相等,平(ping)均值💚等于零(ling),工頻幹㊙️擾得(dé)到了有效的(de)克服。采用三(san)值🆚正弦波勵(lì)磁方式後,經(jīng)過信号處理(lǐ)電路得到的(de)流量信号如(ru)圖3(b)。
2硬件系統(tǒng)
21硬件電路總(zong)體設計
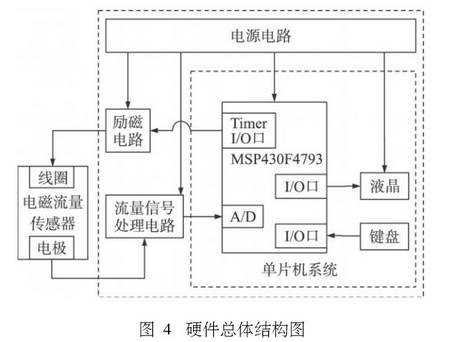
三值(zhi)正弦矩形波(bo)勵磁的電磁(ci)流量計的硬(ying)件部分主要(yao)由傳感器、電(diàn)源電路、勵磁(cí)電路、流量信(xìn)号處理電路(lù)、MCU、液晶和鍵盤(pan)等⛹🏻♀️模塊構成(chéng)。硬件總體結(jie)構圖如圖4所(suo)示。其中傳感(gǎn)器直接由廠(chang)家制作,這裏(lǐ)不做詳細介(jie)紹。電源電路(lu)提供+24V、+12V、+5V以及3.3V。
22勵磁電路(lù)
勵磁系統決(jué)定着傳感器(qì)的工作磁場(chang),是轉換電路(lu)中非常重要(yao)的部分。勵磁(cí)電路由兩部(bù)分構成,如圖(tu)5所示。
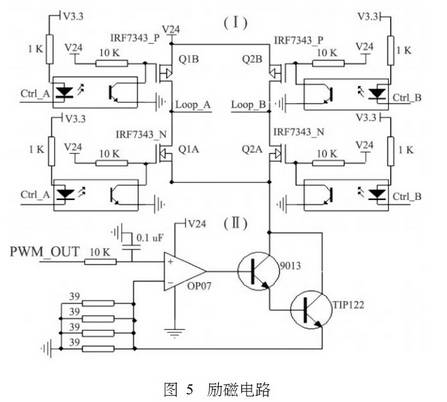
其中,電(dian)路(I)是由4隻光(guang)耦和2片場效(xiào)應管RF7343(每片中(zhōng)有一隻🙇🏻N溝道(dao)和一隻P溝道(dao)型的場效應(yīng)管)組成的橋(qiáo)式開關電路(lu)。通✔️過兩路控(kong)制信号CtrlA和Ctrl_B的(de)高低電平來(lái)控制㊙️場效應(yīng)管的通斷,從(cong)而實現了勵(lì)磁線圈中電(diàn)流方向的切(qie)換❗。電路(I)是由(you)一片運算🧑🏾🤝🧑🏼放(fàng)大器OP07.-隻NPN型三(sān)極管S9013、一隻NPN型(xing)三極管TIP122和4隻(zhi)399采樣☂️電阻組(zu)成的恒流源(yuán)。由MCU的🈚定時器(qi)脈沖寬度調(diao)制(PWM)輸出經🐪過(guo)RC電路濾波後(hou)來控制流過(guo)勵磁線圈的(de)電流I從而産(chǎn)生三值正弦(xián)矩形波。
2.3信号(hao)處理及采集(jí)電路
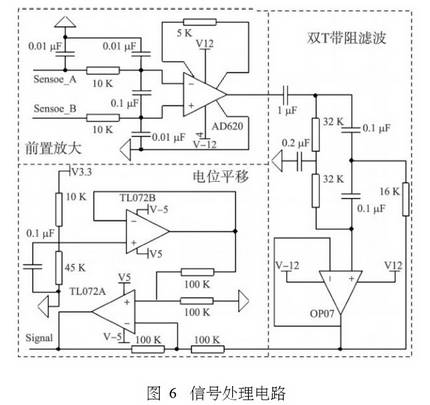
電極輸(shu)出的感應電(dian)動勢信号(微(wei)伏至毫伏級(ji)的交🈲變信☀️号(hao))首先經過RC電(diàn)路濾除部分(fèn)高頻幹擾信(xin)号,然後送入(ru)儀😄用放大器(qi)AD620進行差分放(fang)大,但是由于(yu)幹擾成份較(jiao)多,且有的幹(gàn)擾信号幅🈲值(zhí)遠大✨于信号(hào)本身㊙️,因此AD620的(de)增益不宜設(shè)置得過大,10~20倍(bei)爲佳。流🥵量信(xin)号經過AD620放大(da)後,采用單端(duān)輸出(對地電(diàn)壓)方式後通(tong)過電👈容隔直(zhi),濾去了直流(liu)分量,僅保留(liú)信号的交流(liú)🙇🏻分量。由于測(ce)量‼️電路器件(jiàn)本身存在噪(zao)聲以及其他(tā)幹擾,特别是(shi)50Hz的工頻幹擾(rao),有必要對信(xin)号再次濾波(bo),在此選取了(le)雙T帶阻濾波(bo),電容C取Q1μF,中心(xin)頻率f爲50Hz則R=1/?。C)=1/(2πf0C)≈321Ω。最(zuì)後把正負交(jiao)變的信号進(jìn)行電⚽壓平移(yi),即整體提升(sheng)信号幅值,使(shi)之都爲正值(zhi)後送♋入MCU的ADC引(yǐn)腳。
2.4單片機系(xi)統
采用電磁(cí)流量計的MCU,與(yu)顯示模塊和(he)鍵盤模塊共(gong)同構🔴成單♍片(piàn)🐕機系統。MSP430F4793片内(nei)含2個16位定時(shí)器,每個定時(shí)器各帶♍3個捕(bu)獲此較存儲(chǔ)器和PWN輸出功(gong)能;3路具有可(ke)編程增益放(fang)大(PGA)功能的高(gao)精度16位?-△型ADC;RAM爲(wèi)25KB,FLASH存🌐儲器多達(da)60KB,并且擁有4個(gè)通用同步異(yi)步通信接口(kǒu)。
3軟件系統
電(dian)磁流量計有(you)四種工作模(mo)式:标定模式(shì)、測量模式、測(ce)試模式和空(kong)管檢測模式(shi)。儀表上電後(hou),程序完成一(yī)系列初始化(huà),随後便進入(rù)測量模式開(kāi)始正常工作(zuò)。配合液晶菜(cai)單顯示,用戶(hu)可以通過按(àn)鍵操作來選(xuan)擇其他工作(zuò)模式,操作簡(jian)便。
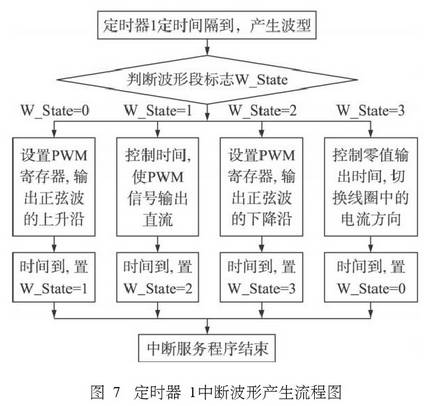
定時器1用(yòng)于産生三值(zhí)正弦矩形波(bō),流程圖如圖(tú)7所示。程序中(zhong)設🌏置兩個有(yǒu)32個元素的數(shu)組分别存放(fàng)用于生成正(zhèng)弦波上升沿(yan)和下降沿的(de)占空比數據(jù),依次使用這(zhe)些值來設置(zhì)定時器的TM1__OCAR寄(ji)存器,控制PWM輸(shū)出的占空比(bi),進而控制RC濾(lü)波電路輸出(chu)的電壓大小(xiao),最📱終得到設(she)計🧡的波形。
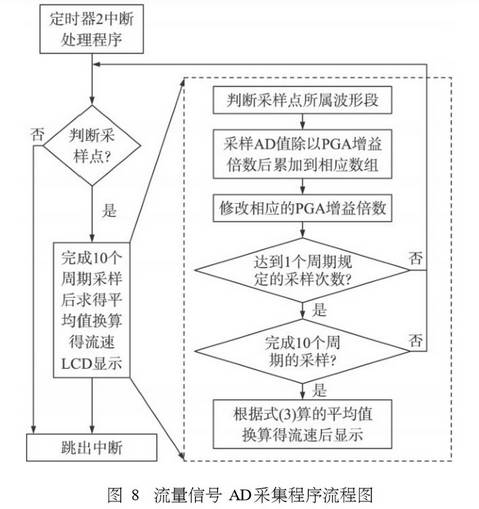
流(liú)量信号AD采集(ji)程序流程如(rú)圖8所示。以10個(gè)周期爲-一個(gè)測量過程,在(zài)每個周期的(de)高、低電平勵(li)磁段各采集(ji)40個采樣點,并(bìng)在兩個零值(zhí)勵磁段各采(cǎi)樣20點作爲相(xiang)對零點,求得(dé)平均值後換(huàn)算得到E正、E負(fù)、E零1和E零2共4個(gè)電勢平均值(zhí)。将E負與E零1的(de)差值作爲勵(li)磁電流正向(xiang)時對應的流(liú)量信号,E負與(yǔ)E零2的差值🌈(負(fù)值)作爲反向(xiàng)流量信号。最(zuì)後把兩個差(cha)值相減作爲(wei)流量信号🈲,所(suo)以流量信号(hào)的計算公式(shi)爲:
E=(E正-E零1)-(E負-E零(líng)2)(3)
其中,采樣時(shí)使用了ADC的前(qian)置可編程增(zeng)益放大器模(mó)🈚塊❤️,放大倍數(shù)爲1~32範圍内的(de)2的倍數,對輸(shu)入到ADC引腳的(de)流量信号進(jìn)行動态調整(zhěng)。當輸入電壓(ya)很小時,增加(jiā)PGA的放大倍數(shù);而當幅值🌈過(guo)大時,則減小(xiǎo)PGA的放大倍數(shù)💜,這樣就使測(ce)得的AD值盡量(liàng)在量程範圍(wéi)的中間區域(yu),從而減小了(le)AD采集本身的(de)誤差,進--步提(tí)👌高了流量信(xìn)号的采樣精(jing)🏃🏻♂️度。
4試驗結(jié)果及分析
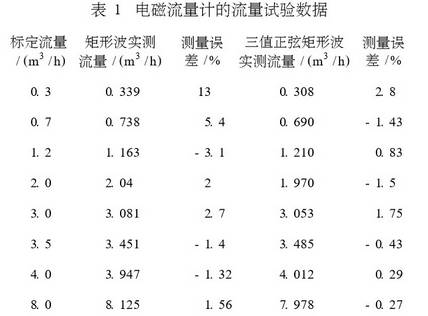
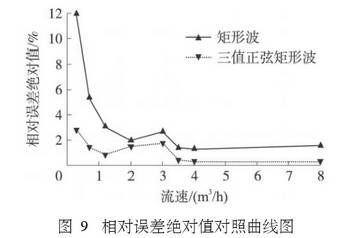
試(shì)驗所用傳感(gǎn)器的内徑爲(wei)50mm,采用标準計(jì)量罐進行标(biao)定。對矩形波(bō)勵磁方式和(hé)三值正弦矩(jǔ)形波勵磁方(fāng)式進行對比(bǐ)試驗,兩者均(jun1)采用5Hz勵磁頻(pín)率,實驗數據(ju)如表1所示。從(cong)試驗結果可(ke)以看出,兩者(zhě)在一定的流(liú)速範圍(大于(yu)20m3/h)内測量精度(dù)都可以達到(dào)士3%以内,但♻️在(zai)小流速(小于(yú)2.0m3/h)測量時,矩形(xíng)波勵磁方式(shi)的誤差随⁉️着(zhe)流量的減小(xiao)迅速增大,在(zài)标💛定流量爲(wèi)0.3m3/h時達到了13%,如(rú)此大的❗誤差(chà)是無法接受(shou)的。與之相比(bǐ),三值正弦矩(jǔ)形波的測量(liang)誤差雖然有(you)所上升但控(kòng)制在±5%以内,明(ming)顯好于矩形(xing)波勵磁。試驗(yàn)證明,新型的(de)三值正弦矩(jǔ)形波勵磁方(fang)式能夠更爲(wèi)有效地消除(chú)微分幹擾和(hé)同相幹擾,從(cong)而顯著地提(ti)高了電磁流(liú)量計在小流(liú)速測量階段(duàn)的精度。
5結論(lùn)
采用新型的(de)三值正弦矩(ju)形勵磁方式(shi)增進了信号(hao)的穩定性,加(jia)強了電磁流(liu)量計在工作(zuò)過程中的抗(kàng)幹擾能力,特(te)别是提高了(le)小流速階段(duan)的測量精度(dù)。MCU采用MSP430F4793提高了(le)采樣精度,簡(jian)化了電路,降(jiàng)低了功耗。用(yòng)戶通過鍵盤(pán)和菜單來選(xuǎn)擇工作模式(shì),完成各項參(cān)數設置,界面(miàn)簡潔美觀,操(cāo)作簡單方便(bian)。系統運行穩(wěn)定,測量精度(du)較高,具有較(jiao)好的推廣應(ying)用價值。
以上(shang)内容源于網(wang)絡,如有侵權(quan)聯系即删除(chu)!